工业机器人将人类从繁重单一的劳动中解放出来,能够从事一些不适合人类甚至超越人类的劳动,实现生产的自动化,避免工伤事故和提高生产效率。延伸和扩大了人的手足和大脑功能,代替人从事危险、有害、低温和高温等恶劣环境中的工作。
(1).png")
机器人末端夹具(EOAT),它是装在工业机器人末端直接抓握工件或执行作业的部件。
根据工业机器人常用作业分析,目前工业机器人的末端夹具能进行的操作有抓取、焊接、打磨等应用场景。而此类夹具所需的位姿可以由工业机器人完成,剩余动作可由机器人提供触发的信号,在快换装置上提供必要的气路和电路,完成不同末端夹具的使用。

.jpg")
机器人快换装置,连接工业机器人和末端夹具,由机器人侧盘和夹具侧盘组成,机器人侧盘安装在工业机器人手腕上,夹具侧与末端夹具连接。通过气动形式形成连接,可快速切换不同夹具,完成搬运、码垛、焊接等多种生产线作业。快换内部结构较为复杂,分别有密封圈、钢球,保证连接精度以及密封性。
(1)(1).png")
.png")

机器人侧盘上有不同的气口,分别为空气锁紧接口,空气松开接口,直通型气孔,给不同气口通气,可发生相应的动作。机器人侧盘和夹具侧上还有为末端夹具提供气压的气路口以及电路连接的端口。
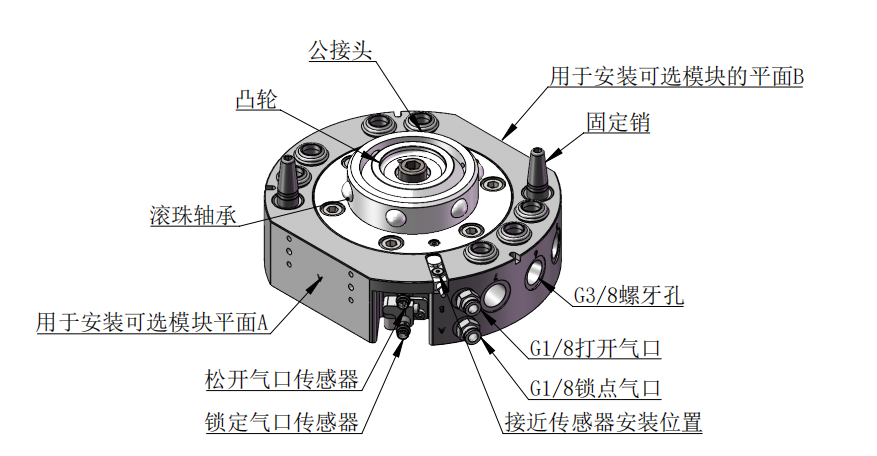

快换连接前处于释放状态,空气接口供气,产生的推力使活塞杆处于下压状态。钢球收于内侧,需夹紧时,向夹紧口供气,机器人侧盘内活塞拉力使活塞杆回拉,并由钢球将夹具侧定位夹紧套按压在着座面上。
在压缩空气的作用下,使钢球推动换枪盘锁紧,在气压保持过程锁紧力得以持续输出,快换持续保持安全锁紧的状态。
意外断气时,钢珠由锁紧平台运动至保险平台,保持在凸轮的保险平台位,能够有效保证夹具侧不会脱开,断气不掉。
因此快换可以有效地应用在工业生产领域,“易于更换”加快了更换末端夹具的速度、“持续锁紧”、“断气不掉”等优势都保障了生产安全。
CRG拥有自动快换、手动快换、方形快换、L形快换等多种型号、款式的产品,可快速更换机械手末端夹具(EOAT),使机器人可以一机多用,轻松在组装、分拣、包装、贴标签等多种作业间灵活切换,从而提高机器人的使用效率。


.png")
.png")
.png")

.jpg")
淘宝、阿里巴巴多平台均有供货,点击下方店铺链接即可查看,欢迎前来咨询。
公司官网:
1688店:
淘宝企业店:
https://shop410031958.taobao.com
微信扫一扫
关注该公众号







